Bloc Contenu 'Tutoz 3D XSI-Rigging avancé d'un bras'
Méthode
Quand vous paramétrez un personnage, il est facile d'imaginer toute les choses qu'il est possible de faire et comment il est simple de manipuler et de transformer. Durant le Rigging, beaucoup de ces idées s'envolent à cause des contraintes de planning et/ou des difficultés techniques. L'une des choses qu'un animateur rêve de pouvoir faire, c'est de pouvoir animer l'étirement et l'écrasement (squash & stretch), une technique classique de l'animation qui est souvent mis de coté par les professionnels du paramétrage 3D. Bien sûr, le Principe du squash & stretch peut être mis en œuvre dans les poses du personnage et dans le comportement de ses extrémités, mais voyons comment la liste de souhait si dessous peut être mise en œuvre dans le Rigging fonctionnel d'un bras et dont le contrôle du squash & stretch est facile et rapide :
- Capacité à déformer (S&S) une chaîne et de pouvoir mettre ce comportement On/Off
- Capacité à réinitialiser n'importe quelle taille (S&S) sans changer la posture (le long de l'axe Effecteur/root)
- Capacité à déformer l'avant bras et le bras individuellement ou les deux ensemble (Effecteur reste en place)
- Permettre au volume du bras de changer et de pouvoir mettre ce comportement On/Off
- Pouvoir sélectionner manuellement la partie déformable et animable de la main
- Placer le coude dans n'importe quel direction (indépendamment du reste de la chaîne, pour l'ajustement de la pose finale et la capacité de casser les articulations comme décrit dans « The animator's survival kit »)
- Passer à une cinématique inversée ou à une cinématique normale (personnaliser une excellente capacité au changement du FK/IK pour le Rigging)
- Pouvoir rapidement verrouiller la position d'une main pendant l'animation (pour la poser sur une table par exemple...)
- Prévoir une rotation divisée au niveau de l'avant bras pour bien gérer les déformations du maillage à cet endroit.
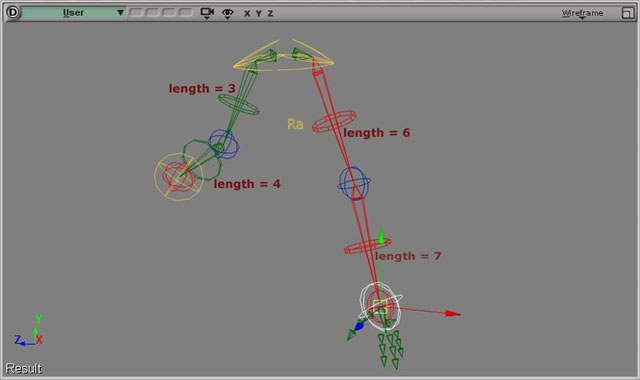
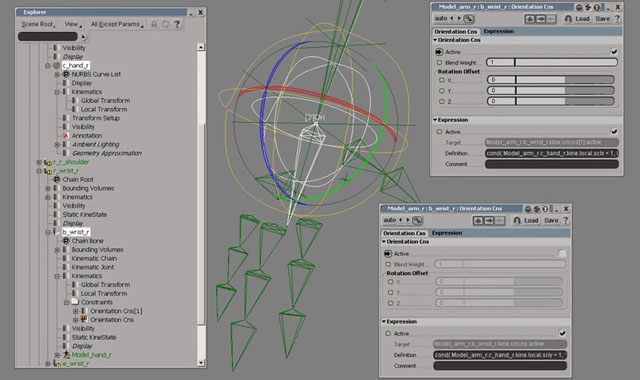
Image 1 – Le Rigging complet et finalisé